Evo kako sam "spakovao" konacno Protosa...

Postavio sam AR6200 prijemnik na predvidjeno mesto, a njegov dodatni prijemnik sam postavio ovako...
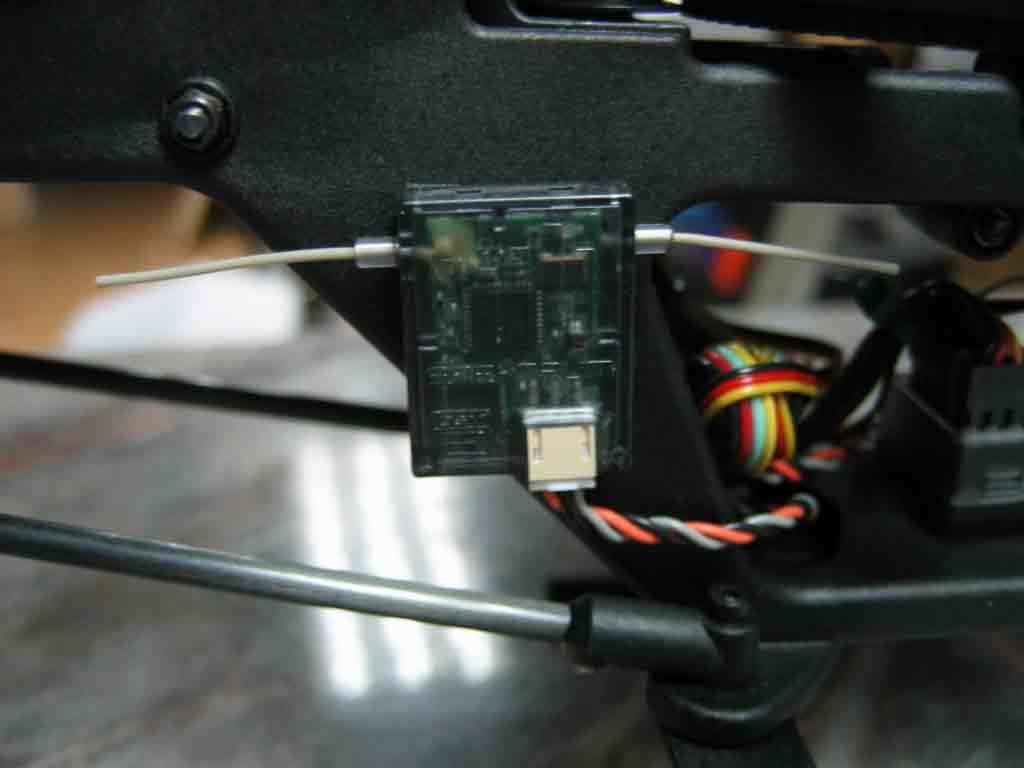
Zalepljeni su sa dvostrano lepljenim sundjerom...
Zatim postavljen je gyro Futaba 401 takodje na svoje mesto...

sa Robbe digitalnim servoom FS251S...

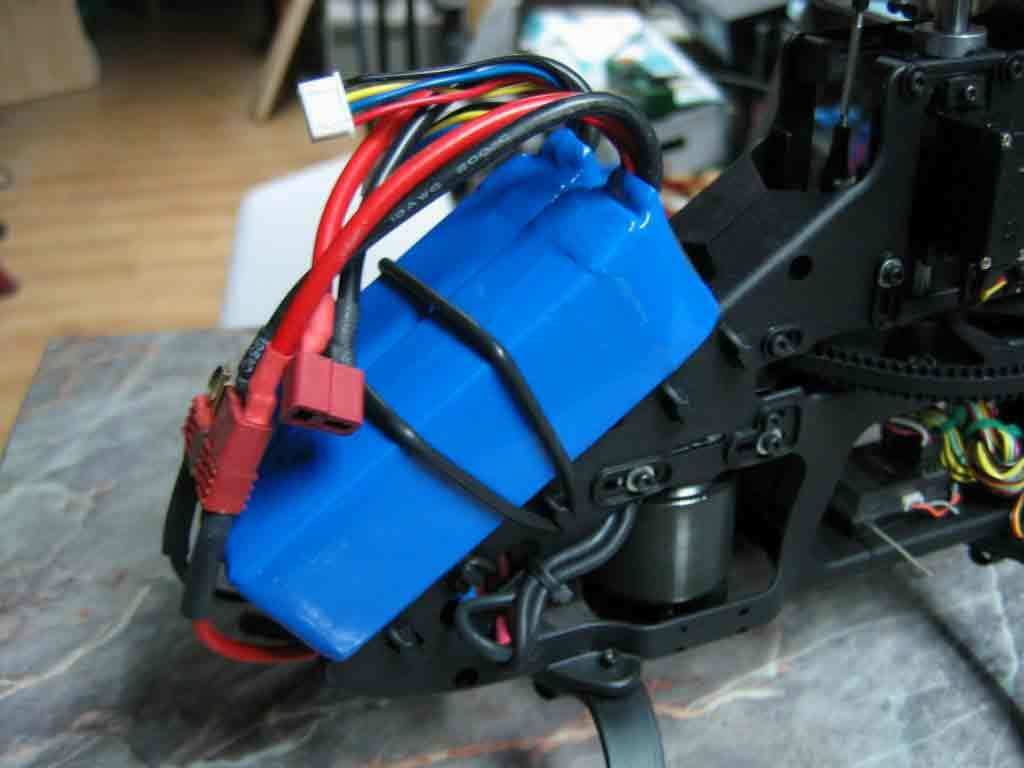
Kablove sam pricvrstio ovako:

kao sto se vidi na predhodnoj slici morao sam da malo probusim frame da bih lepo pricvrstio kabel...
Robi koristim Zippy-H 2200mAh 20-30C 3S1P baterije, naravno po 2 komada spojena redno...
Od slika sa prvog leta imam samo ovu gde se vidi da je podignut sa zemljice...

No nadam se da kada bude lepse vreme (valjda ce se i to uskoro desiti) moci da okacim i snimak leta...
Sale


